Genetic Algorithm Pathfinding
Pathfinding obstacles using a genetic algorithm
July 2018
ProcessingJava
Project Overview
I started this project to understand the basics of machine learning and to develop my understanding of Processing. The program implements a genetic algorithm for pathfinding around obstacles.
How It Works
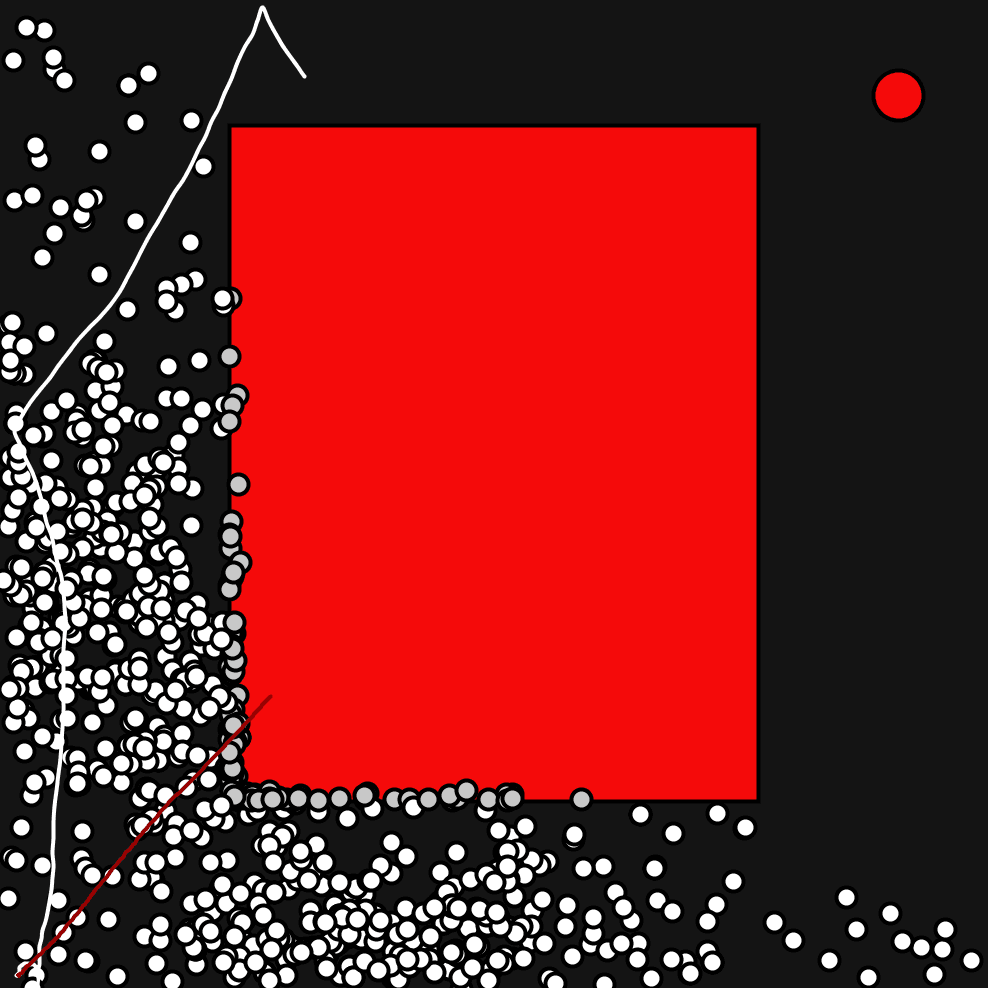
- The user draws a rectangular obstacle on the screen.
- 800 particles are created with a random set of left, right, up, and down directions that are executed throughout each frame of the generation.
- Each particle has a velocity that is modified by the set of random directions.
- At the end of each generation, each particle's "fitness" is measured by its distance from the target in the top right.
- Particles that hit the obstacle are disabled and their fitness value is set extremely high.
- The better half of the population (lowest fitness values) is kept for the crossover function.
Crossover and Mutation
In the crossover function:
- Two particles are picked from the top half.
- Their "directions" are split at a random point.
- One part of the directions from each "parent" is used to form a new particle for the next generation.
- This is repeated until there are enough particles for the next generation.
- There's a 5% chance that a particle's directions will be modified at one point, adding extra variation.
Results
In each generation, the directions from the best-performing particles eventually spread throughout the entire population, and the average fitness starts to converge rapidly with the best fitness.